The Controller Area Network (CAN) bus protocol is a robust vehicle bus standard designed to enable microcontrollers and devices to communicate with each other within a vehicle without a host computer. Developed by Bosch in the mid-1980s, the CAN bus has become the de facto standard in automotive communication systems, as well as in industrial automation and other applications requiring reliable, high-speed data exchange.
Key Features of CAN Bus
- Robustness: The CAN bus protocol is highly resilient to electrical disturbances. It has error detection and correction to ensure data integrity.
- Efficiency: CAN bus operates using a prioritized message system. Higher priority messages gain access to the bus, ensuring critical data is transmitted first.
- Speed: Depending on the version, CAN bus supports different data rates. Classical CAN supports up to 1 Mbps, while CAN FD (Flexible Data-rate) can handle up to 5 Mbps.
- Scalability: CAN bus can be implemented in systems with a small number of nodes or expanded to larger networks with multiple devices.
- Low Cost: The simplicity of the protocol, coupled with its high reliability, makes it a cost-effective solution for many applications.
How CAN Bus Works

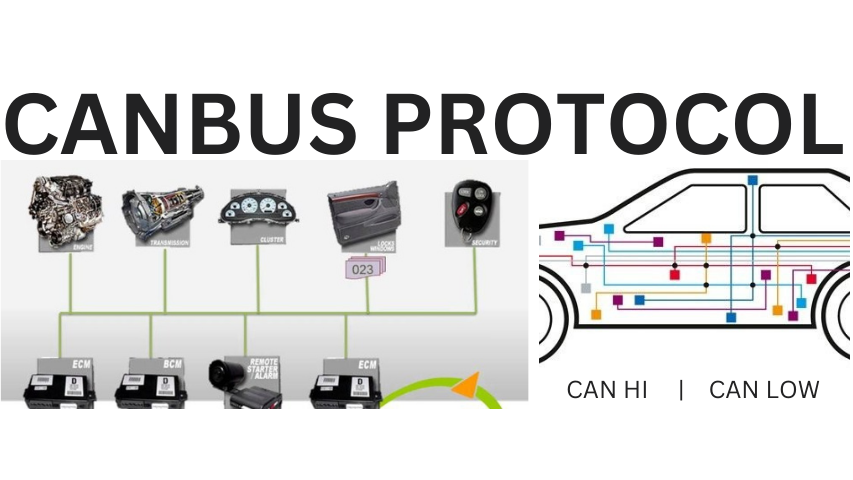
The CAN bus uses a multi-master, message-oriented protocol. This means that any device (node) on the network can send and receive messages, and each message contains a unique identifier. Here is a breakdown of the key components and operation of the CAN bus protocol:
- Nodes: Each node on the CAN network is typically a microcontroller with an integrated CAN controller and a transceiver. The CAN controller is responsible for handling the message framing, arbitration, and error detection.
- Bus Architecture: The physical medium of CAN bus consists of a twisted pair of wires, typically called CAN_H (high) and CAN_L (low). These wires carry differential signals to enhance noise immunity and reduce electromagnetic interference.
- Message Frame: A CAN message frame consists of several fields, including:
- Identifier: A unique identifier that determines the priority of the message.
- Control Field: Specifies the length of the data field.
- Data Field: Carries the actual data being transmitted, up to 8 bytes in Classical CAN or up to 64 bytes in CAN FD.
- CRC Field: Contains a cyclic redundancy check code for error detection.
- ACK Field: Used to acknowledge receipt of the message.
- End-of-Frame (EOF): Indicates the end of the message.
- Arbitration: When multiple nodes attempt to transmit simultaneously, CAN uses a non-destructive bitwise arbitration method. Each node monitors the bus while transmitting. If a node detects a higher priority message (determined by the identifier) being sent, it ceases its transmission and retries later.
- Error Handling: CAN bus has built-in error detection and correction mechanisms. Errors such as bit errors, stuff errors, and CRC errors are detected, and erroneous messages are discarded. Nodes maintain error counters and can transition to an error-passive state or even a bus-off state if too many errors are detected.
Applications of CAN Bus
The versatility and reliability of the CAN bus protocol make it suitable for a wide range of applications beyond the automotive industry, including:
- Industrial Automation: Used for machine control and factory automation systems.
- Aerospace: Employed in aircraft for data communications between different subsystems.
- Medical Equipment: Ensures reliable data transfer in medical devices.
- Building Automation: Utilized in HVAC systems and other building controls.
Advancements in CAN Bus
The evolution of the CAN bus protocol has led to the development of CAN FD (Flexible Data-rate), which extends the capabilities of Classical CAN by allowing larger data payloads and higher data rates. This advancement addresses the growing demand for increased data throughput and speed in modern applications.
In summary, the CAN bus protocol is a fundamental communication system in many industries, offering robust, efficient, and scalable data exchange. Its design ensures reliable performance in environments where data integrity and real-time communication are critical.